
+86-13806413610
svetlanaxu@mail.ru







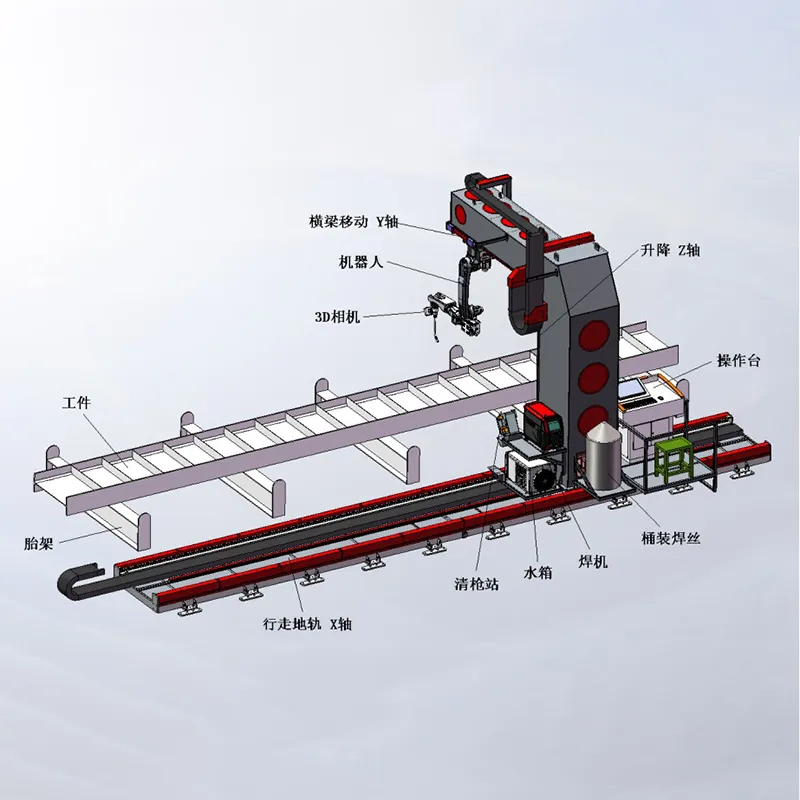
Роботизированная Сварочная Линия для стальных конструкций
Когда слышишь ?роботизированная сварочная линия для стальных конструкций?, многие сразу представляют себе футуристичный цех, где всё делает само. На деле же, это чаще история про интеграцию, где робот — лишь часть цепи, и самая простая. Основная головная боль — не сам роботизированная сварочная линия, а подготовка деталей, их точная фиксация и, что уж греха таить, качество исходного металлопроката. Если балка пришла с геометрией ?банана?, никакой робот шов ровно не положит. Это первое, с чем сталкиваешься на практике.
Не роботом единым: что на самом деле критично в линии
Итак, сама линия. Если брать для типовых конструкций — фермы, колонны, — то часто это не один гигантский комплекс, а несколько станций. Например, узел сборки под сварку, где детали стыкуются. Здесь многие ошибаются, думая, что можно обойтись простыми упорами. Для роботизированной сварки нужна жёсткая, точно выверенная оснастка, часто гидравлическая. Малейший люфт — и весь выигрыш в скорости и качестве теряется на переделках.
Вот тут как раз вспоминается опыт с одним нашим заказчиком по мостам. Они купили дорогого японского робота, но сэкономили на позиционере и системе фиксации. В итоге робот работал на 30% своей возможности, потому что больше времени уходило на ручную подгонку и контроль положения. Вывод простой: сварочная линия — это система, и слабое звено определяет всё.
Что ещё часто упускают? Система управления. Она должна не просто хранить программы, но и иметь возможность быстро их адаптировать под разные типы швов и серии. В мелкосерийном производстве стальных конструкций, а это большинство рынка, гибкость решает. Иногда проще и быстрее сделать часть операций вручную, чем перенастраивать сложную автоматику на пять изделий.
Практические грабли: от программ до расходников
Программирование. Казалось бы, загрузил модель, и робот сам всё посчитал. В реальности траекторию, скорость и углы наклона горелки часто приходится ?доводить напильником? прямо на изделии. Особенно с толстостенными деталями, где важен прогрев. Бывало, идеальный шов на симуляторе превращался в брак из-за разницы в теплоотводе у уголка и полки балки. Приходится закладывать технологу время на эту самую ?калибровку глазами и опытом?.
Расходные материалы — отдельная тема. Проволока, газ. Робот не пожалуется на слабый поток газа или на плохую разматываемость катушки. Он просто положит пористый шов. Поэтому система подачи проволоки должна быть безупречной, а её обслуживание — регулярным. Мы как-то попали на брак партии проволоки, которая рвалась внутри подающего шланга. Робот продолжал работать, а шов шёл с пропусками. Нашли не сразу.
И, конечно, обслуживание. Пыль, брызги, вибрация. Роботизированный комплекс требует чистоты и регулярного ТО не меньше, чем хороший станок. Забившийся пылью вентилятор на блоке управления или износившийся контактный наконечник могут остановить линию на полдня. Это не ?поставил и забыл?, это постоянный процесс.
Связь с другими процессами: где рождается эффективность
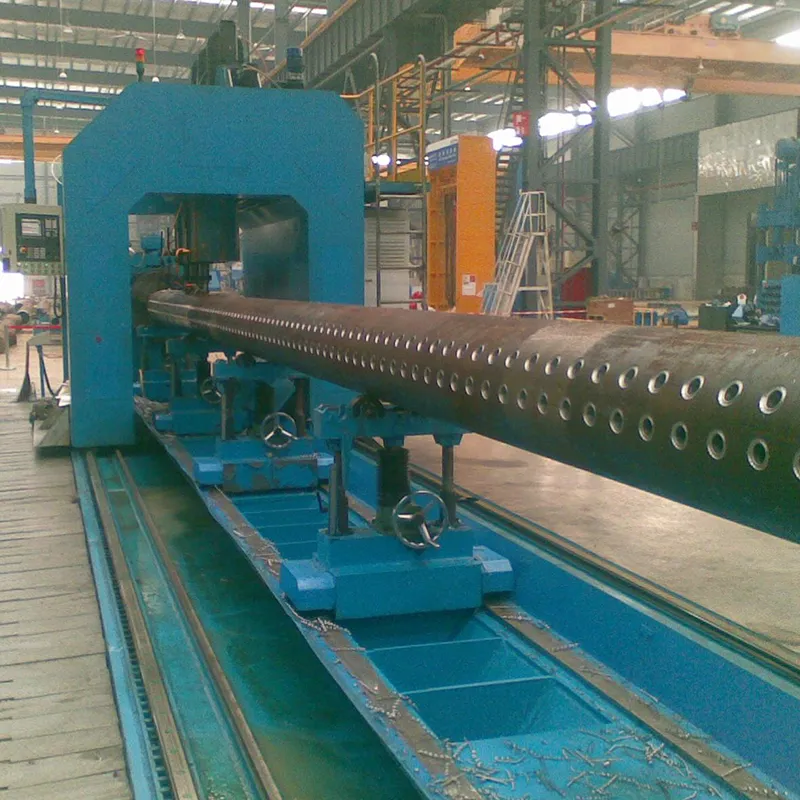
Сама по себе роботизированная линия для стальных конструкций мало что даст, если перед ней нет отлаженного участка резки и обработки деталей. Вот, к примеру, если говорить о подготовке. Компания Jinan Safety United Technology and Trade Co., Ltd., с чьим оборудованием мы сталкивались, как раз фокусируется на этом сегменте — высокоскоростное сверлильное и пробивочное оборудование для металлических пластин, двутавров, уголков. И это логично. Потому что идеально просверленные монтажные отверстия в балке — это гарантия, что на линии сборки она встанет в оснастку без подгонки, а значит, и робот начнёт сварку с правильной точки.
Их сайт, https://www.safetycnc.ru, хорошо показывает эту связку: подготовка деталей для башен, мостов, сосудов давления. Если на входе в сварочную линию идёт деталь с неточной перфорацией или неровными кромками, все преимущества роботизации сводятся к нулю. Получается, что эффективность целой линии начинается с качества работы станка для пробивки трубной пластины или резки угловой стали.
Поэтому, проектируя линию, мы всегда смотрим на весь техпроцесс целиком. Иногда лучше вложиться в более точный гильотинный станок или координатно-пробивной пресс (тут как раз к месту решения от Safety United), чем наращивать количество сварочных роботов. Потому что они будут простаивать в ожидании годных заготовок.
Кейсы и тупики: что сработало, а что нет
Был у нас проект по автоматизации сварки узлов для опор ЛЭП. Казалось, идеальный кандидат — типовые детали, большие серии. Запустили линию, а через месяц столкнулись с проблемой разнотолщинности металла в партиях уголка от разных поставщиков. Робот, запрограммированный на один тепловой режим, то не проплавлял толстый участок, то прожигал тонкий. Пришлось внедрять систему датчиков, отслеживающую в реальном времени ширину разделки и корректирующую параметры. Это спасло проект, но увеличило стоимость и сроки окупаемости.
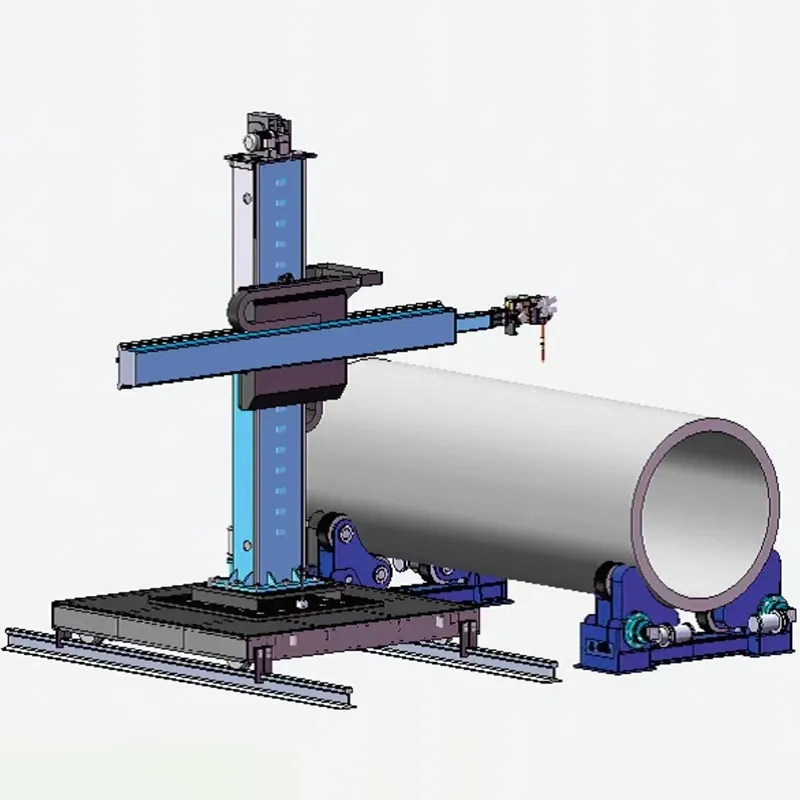
А вот негативный пример. Пытались применить стандартную роботизированную ячейку для сварки фланцев к трубам большого диаметра в конструкции сосудов высокого давления. Не вышло. Геометрия была слишком сложной для стандартных алгоритмов, а заказчик требовал абсолютной гарантии провара по всему периметру. В итоге вернулись к автоматической сварке под флюсом со специальным вращателем. Робот не стал панацеей. Это важный урок: не всякая сварочная линия для стальных конструкций должна быть роботизированной. Иногда проверенная специализированная автоматика надёжнее.
Успешным же оказался проект, где робот варил длинные тавровые швы на стенках балок для строительных конструкций. Монотонная, утомительная для человека работа. Здесь робот дал выигрыш и в качестве (стабильность), и в скорости, и в охране труда. Но ключом к успеху была предварительная стыковка деталей на мощных магнитных призмах с гидроприжимом, что обеспечило нулевой зазор по всей длине.
Взгляд вперёд: куда движется технология
Сейчас много говорят про системы технического зрения и адаптивную сварку. Это, безусловно, будущее для мелкосерийного производства. Робот, который сам сканирует реальную разделку кромок и подстраивается под неё, — это снятие огромного пласта проблем с подготовкой. Но пока такие системы капризны в условиях цеховой пыли и требуют серьёзных вложений. Для большинства российских предприятий, выпускающих стальные конструкции, это пока что следующий этап.
Более реалистичный тренд — не усложнение самого робота, а развитие периферии: более умные и быстрые позиционеры, системы подачи заготовок, интеграция с CAD/CAM-системами для сквозного проектирования. Чтобы инженер, создавая чертёж мостовой фермы, уже генерировал не только управляющую программу для сверлильного станка (например, от того же Safety United), но и программу траектории для сварочного робота.
Итог моего опыта таков: роботизированная сварочная линия — это мощный инструмент, но не волшебная палочка. Её внедрение имеет смысл при отлаженном, предсказуемом входном потоке деталей и при наличии команды, готовой не просто обслуживать железо, а понимать весь процесс. Иначе она превратится в очень дорогой способ демонстрации прогресса, который будет проигрывать по эффективности сварщику-ветерану с его полуавтоматом. Главное — видеть линию как часть целого, где сварка лишь один, пусть и важный, этап.
Соответствующая продукция
Соответствующая продукция






Самые продаваемые продукты
Самые продаваемые продукты-
 Автоматический Трёхкоординальный сверлильный станок для двутавровой балки. CBD700
Автоматический Трёхкоординальный сверлильный станок для двутавровой балки. CBD700 -
 Автоматический Трёхкоординалыный сверлильный станок для двутавровой балки, BHD1206A
Автоматический Трёхкоординалыный сверлильный станок для двутавровой балки, BHD1206A -
 Автоматическая Линия для пробивки и рубки швеллерной стали в трёх стороне с ЧПУ, UL-0816
Автоматическая Линия для пробивки и рубки швеллерной стали в трёх стороне с ЧПУ, UL-0816 -
 Дуговой Сварочный станок под флюсом для двутавровой балки и коробчатой балки, модель SUMH-5000
Дуговой Сварочный станок под флюсом для двутавровой балки и коробчатой балки, модель SUMH-5000 -
 Портальный Сверлильно- фрезерный станок с ЧПУ для трубных досок, теплообменника и фланца. PXD3030/5025/6030/7040
Портальный Сверлильно- фрезерный станок с ЧПУ для трубных досок, теплообменника и фланца. PXD3030/5025/6030/7040 -
 Сварочная колонна LCH4050
Сварочная колонна LCH4050 -
 Сварочная станция XB9-A9 с роботом под порталом BR-2010A Pro
Сварочная станция XB9-A9 с роботом под порталом BR-2010A Pro -
 Сверлильно- фрезерный станок с магазином АЗИ GPMD2020
Сверлильно- фрезерный станок с магазином АЗИ GPMD2020 -
 Волоконно-Лазерный станок для резки листового металла ,Model: FR-3015, 6000W.
Волоконно-Лазерный станок для резки листового металла ,Model: FR-3015, 6000W. -
 Линия для изготовления двутавровых балок
Линия для изготовления двутавровых балок -
 Дыропробивная производственная линия с ЧПУ серии PPM
Дыропробивная производственная линия с ЧПУ серии PPM -
 Гидравлическое Оборудование для маркировки уголка и пластины, YZ-100
Гидравлическое Оборудование для маркировки уголка и пластины, YZ-100
Связанный поиск
Связанный поиск- Плазменный станок для сверления и резки двутавровой балки с ЧПУ
- Линия для производства опора вышки ЛЭП
- Пробивный станок для уголка
- Сверлильный станок для обработки трубы
- Станок с ЧПУ для пробивки и резки угловой стали
- Станок с ЧПУ для пробивки угловой стали
- Станок для пробивки, маркировки и резки угловой стали, швеллера и листа с ЧПУ, JBX1612
- Двухстолонный Поворочный Ленточнопильный станок
- Высокоскоростный Сверлильно-фрезерный станок с ЧПУ
- Гидравлический дыропробивной станок с ЧПУ серии PPL для обработки толстолистовой стали